WinOLS has become the industry standard for ECU calibration editing, and for good reason. Developed by EVC Electronic, it provides a structured environment for viewing, identifying, and modifying calibration maps stored inside ECU firmware. But here is what most users discover quickly: WinOLS is only as powerful as the data definitions you feed it. Without proper map identification, axis definitions, and checksum handling, you are essentially staring at a wall of hexadecimal values with no context. This is where professional ECU reverse engineering transforms WinOLS from a capable editor into a precision calibration instrument.
In this article, we walk through the WinOLS ECU calibration workflow from a reverse engineering perspective. We explain how map identification actually works under the hood, why DAMOS A2L files are so valuable, how checksum correction plugins operate, and why the combination of deep firmware analysis and WinOLS produces results that off-the-shelf map packs simply cannot match.
What WinOLS Actually Does (and What It Does Not)
At its core, WinOLS is a hex editor with calibration-specific features layered on top. It reads binary firmware files, typically ranging from 1 MB to 8 MB depending on the ECU platform, and provides tools for defining 2D maps (curves), 3D maps (tables), and single-value constants within that binary data. Once maps are defined with proper axis scaling and labels, tuners can visualize and modify calibration parameters such as fuel injection timing, turbo boost pressure targets, torque limiters, and exhaust gas recirculation rates.
What WinOLS does not do is tell you where those maps are, what they control, or how they interact with each other. A raw firmware dump loaded into WinOLS shows nothing but hex data. The intelligence, meaning the map definitions, axis assignments, and parameter descriptions, must come from somewhere. That “somewhere” is either a pre-built definition file (a .damos file, also called a mappack), an A2L/ODX description file from the OEM development chain, or manual identification through advanced ECU firmware reverse engineering.
Map Identification: The Foundation of WinOLS ECU Calibration
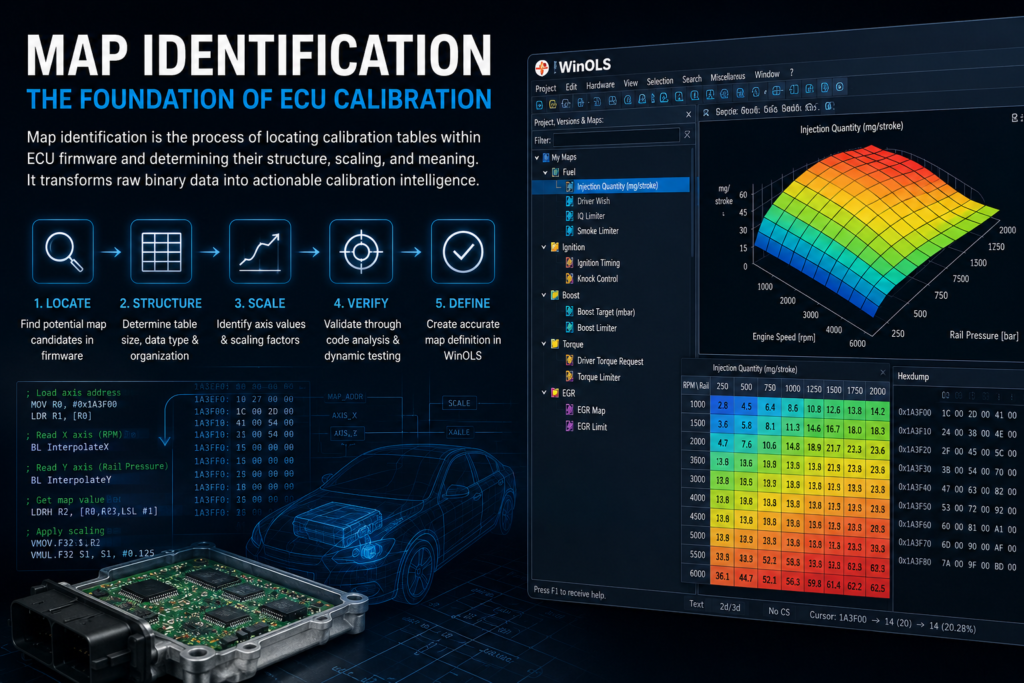
Map identification is the process of locating calibration tables within a firmware binary and determining their structure: how many rows, how many columns, what data type (8-bit, 16-bit, 32-bit, signed or unsigned), what scaling factor converts the stored integer to a real-world engineering value, and what physical parameters the X and Y axes represent.
There are several approaches to map identification, each with different levels of accuracy and completeness:
| Identification Method | Accuracy | Coverage | Source |
|---|---|---|---|
| Automatic WinOLS search | Low-Medium | Partial | Heuristic pattern matching |
| Community map packs | Medium | Common maps only | Shared definitions |
| A2L/DAMOS import | High | Near-complete | OEM development files |
| Professional reverse engineering | Highest | Complete | Disassembly and firmware analysis |
WinOLS includes a built-in automatic map search that scans the binary for patterns that resemble calibration tables. It looks for pointer structures, data alignment boundaries, and value ranges that suggest map data. While this can find obvious large maps, it frequently misidentifies data regions as maps, misses smaller or unconventionally structured tables, and cannot determine axis scaling or parameter meaning. It is a starting point, not a solution.
Professional map identification through firmware reverse engineering is a different process entirely. By disassembling the firmware in tools like Ghidra, we trace how the ECU software actually reads and uses calibration data. When we follow the code path for, say, the injection timing calculation, we find the exact memory address where the lookup table lives, we see the code that performs the axis interpolation, and we can determine the data format and scaling from the arithmetic operations applied to the raw values. This produces map definitions that are verifiably correct because they come directly from how the software uses the data.
Our team specializes in building complete WinOLS map definitions through firmware reverse engineering. If you need accurate calibration data identification for an ECU platform that lacks proper DAMOS or map pack support, get in touch to discuss your project.
DAMOS and A2L Files: The OEM Description Layer
DAMOS (DATenbank MOtor Steuergeraet, or Engine Control Unit Database) files and A2L files are description files created during the OEM software development process. They contain complete definitions of every calibration parameter in a given firmware version, including map addresses, dimensions, data types, axis definitions, conversion formulas, and human-readable parameter names and descriptions.
An A2L file, following the ASAM MCD-2MC standard, is structured in a way that calibration tools like INCA, CANape, and WinOLS can parse directly. A typical A2L parameter definition includes the memory address offset, the number of rows and columns, the computation method (linear formula, lookup table, or verbal description), the physical unit (degrees, bar, mg/stroke), and the axis point distributions. When you import a matching A2L file into WinOLS, every calibration map appears with correct labels, proper axis scaling, and engineering unit display. The difference between working with and without an A2L file is the difference between reading a labeled dashboard and guessing what unlabeled gauges mean.
The challenge is that DAMOS and A2L files are OEM-internal documents. They are not publicly distributed, they are version-specific (a file for software version 1.0 may not match version 1.3 if map addresses shifted), and they cover only the specific ECU variant they were created for. When a matching description file is not available, which is the case more often than not for aftermarket calibration work, the alternative is reverse engineering the firmware to reconstruct that same information.
Through calibration extraction and map-finding analysis, we can produce WinOLS-compatible definition files that replicate the functionality of an OEM DAMOS. We identify the calibration region boundaries, locate the map pointer tables used by platforms like Bosch MED17 and EDC17, and define each parameter with proper scaling derived from the firmware code itself.
Checksum Correction: The Step Most People Underestimate
Every modern ECU firmware contains checksum or CRC validation routines that verify the integrity of the calibration data region at startup. If you modify any map value in WinOLS and flash the file back without correcting the checksum, the ECU will either reject the firmware entirely, fall into a diagnostic error mode, or revert to a safe default calibration. Checksum correction is not optional.
WinOLS handles checksums through its plugin architecture. EVC and third-party developers provide checksum correction modules (.dll plugins) for specific ECU families. When you save a modified firmware file, the appropriate plugin recalculates and patches the checksum values so the ECU accepts the modified binary as valid.
What is less obvious is how these checksum plugins are developed in the first place. Someone had to reverse engineer the checksum and CRC algorithms used by each ECU platform. This means identifying the checksum routine in the disassembled firmware, determining which memory regions are covered by which checksum, understanding the algorithm type (CRC32, simple summation, XOR-based, proprietary), and locating where the expected checksum values are stored. For some platforms this is straightforward. For others, particularly those with multi-layer checksum schemes or RSA signature verification, it requires significant reverse engineering effort.
When a WinOLS checksum plugin does not exist for a given ECU variant, which happens frequently with newer or less common platforms, the firmware must be analyzed to develop a correction solution. This is one of the most common reasons clients engage our ECU reverse engineering services: they have a firmware file open in WinOLS, they can see and modify maps, but they cannot flash the result because no checksum plugin covers their specific ECU.
Missing checksum plugin for your ECU platform? We develop custom checksum correction solutions by analyzing the actual validation routines in your firmware. Contact us with your ECU details and we will evaluate what is needed.
The WinOLS Workflow With Professional Reverse Engineering Support
The typical WinOLS ECU calibration workflow, when supported by proper reverse engineering, follows a structured sequence that maximizes both accuracy and efficiency:
Firmware acquisition is the first step. The binary must be read from the ECU, either through the OBD diagnostic interface using protocols like UDS with SecurityAccess authentication, or through direct hardware methods such as BDM, JTAG, or boot mode access. The method depends on the ECU platform and the level of read protection implemented.
Firmware analysis follows. The binary is loaded into a disassembly environment where the calibration data region is identified, map pointer structures are decoded, and individual calibration parameters are cataloged. This analysis also identifies the checksum algorithm and any additional integrity protections.
Definition creation translates the reverse engineering findings into WinOLS-compatible formats. Map locations, dimensions, data types, axis references, and scaling formulas are packaged into definition files that WinOLS can import. Once loaded, every identified map appears labeled and properly scaled in the WinOLS interface.
Calibration modification is where WinOLS truly shines. With complete, accurate definitions loaded, the tuner or calibration engineer can work with clearly labeled maps, make precise adjustments to specific parameters, and visualize the relationships between related tables. This is the point where WinOLS delivers its real value, and it only works well when the underlying definitions are correct.
Validation and flashing closes the loop. Checksums are corrected (either through an existing plugin or a custom solution), the modified binary is verified for structural integrity, and the firmware is written back to the ECU.
Why Off-the-Shelf Map Packs Fall Short
Commercially available map packs and shared .damos files cover a subset of common ECU platforms, primarily popular Bosch, Siemens/Continental, and Denso units found in high-volume European vehicles. They work well for the platforms they cover, but they have inherent limitations.
First, they rarely include all calibration parameters. A typical map pack might define 50 to 200 commonly tuned maps, while the full firmware may contain 500 to 2000+ calibration parameters. Maps related to emissions control, cold-start behavior, altitude compensation, transmission integration, and diagnostic thresholds are often missing from aftermarket packs because they are not commonly modified in performance tuning.
Second, map packs are version-locked. Firmware updates from the OEM may shift calibration addresses, add new parameters, or restructure existing ones. A map pack built for one software version may produce incorrect map boundaries or wrong axis scaling when applied to a different version of the same ECU family.
Third, some ECU platforms simply have no aftermarket map pack support. Industrial engines, marine applications, heavy-duty commercial vehicles, agricultural equipment, and newer automotive platforms often lack WinOLS definition coverage entirely. For these applications, reverse engineering is the only path to usable WinOLS definitions.
WinOLS ECU Calibration for Specialized Applications
Beyond standard automotive tuning, WinOLS is used in specialized calibration scenarios where the stakes and complexity are higher. Fleet operators modifying commercial vehicle ECUs for fuel economy optimization need complete map coverage, not just the common performance maps. Motorsport teams require precise control over parameters that consumer-oriented map packs do not cover: individual cylinder correction maps, knock control sensitivity tables, and transient fueling compensation curves.
In forensic and firmware tampering investigation contexts, WinOLS serves as an analysis tool rather than a modification tool. Comparing a suspected tampered firmware against a known stock binary, with full map definitions, reveals exactly which parameters were changed and by how much. This requires the same complete map identification that performance calibration does.
The PCB-level understanding of the ECU hardware also plays a role. Knowing the processor architecture, memory layout, and peripheral configuration helps validate that firmware binaries loaded into WinOLS are correctly aligned and that the calibration region boundaries are accurate.
Making WinOLS Work for You
WinOLS is a powerful calibration editing platform, arguably the best available for aftermarket ECU work. But its effectiveness depends entirely on the quality of the map definitions and checksum handling behind it. For well-supported, high-volume ECU platforms with good existing map packs, WinOLS delivers excellent results right out of the box. For everything else, professional reverse engineering is the bridge between a raw firmware binary and a fully defined, checksum-corrected WinOLS project.
Whether you need complete map definitions for an unsupported ECU platform, a custom checksum correction solution, or A2L-equivalent definition files generated through firmware analysis, the combination of reverse engineering expertise and WinOLS capability produces calibration results that no other approach can match.
Let's Work Together
Need Professional Assistance with Reverse Engineering or Cybersecurity Solutions? Our Team is Ready To Help You Tackle Complex Technical Challenges.